在机械设计中使用凸轮可以帮助我们完成各种设计好的不规律的循环运动,为了实现这种运动,凸轮的型线设计成为了一个设计难点,为了精确的匹配运动件的运动规律,我们需要设计精确的凸轮型线。
在前面的内容我们介绍过了在solidworks中根据凸轮型线设计凸轮和简谐运动的圆柱凸轮这两种凸轮的画法,这两种画凸轮的方法都是根据已有凸轮型线直接画凸轮的方法。
如果没有现有的型线,我们就要根据运动件的运动来反向设计凸轮了。
在solidworks中,我们可以通过solidworks motion仿真模块来实现这一功能。在下面的内容中,猫亮设计给大家来分享一下具体的操作。
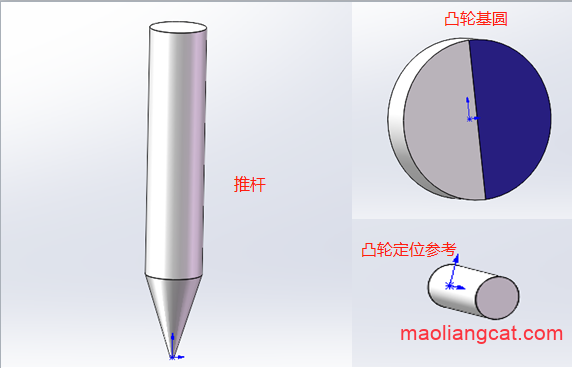
- 首先建立以下三个零件模型,一个推杆,一个凸轮基圆,一个凸轮的定位参考。使用分割线将凸轮基圆的端面分割成为两个面,并给一个颜色以示区别。
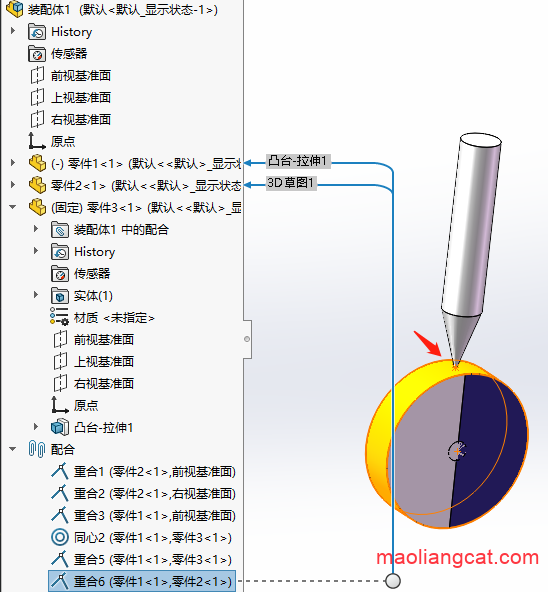
- 建立一个装配体文件,将三个零件装配到一起。在配合中对这个三个零件添加约束关系,将凸轮定位参考固定,对凸轮基圆和凸轮定位参考添加同轴及端面重合的关系,使凸轮基圆在旋转方向上能够自由旋转;推杆垂直方向的两个基准面与凸轮基圆保持重合关系,推杆在垂直方向上可以自由上下移动;最后给推杆底部和凸轮基圆圆周面添加重合关系,使推杆和凸轮基圆重合,推杆和凸轮基圆重合后删除这个配合关系。
- 打开solidworks 插件中的solidworks motion。
- 新建一个运动算例,选择motion分析。
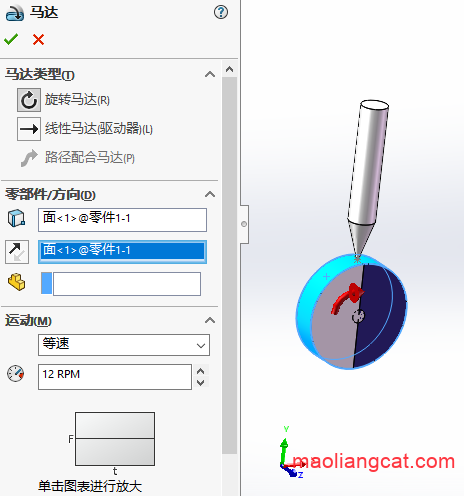
- 为凸轮基圆添加旋转马达,选择凸轮基圆的圆周面,采用等速运动,转速设置为12rpm。为什么要把转速设置为12rpm呢?因为这个转速刚好5秒钟凸轮基圆能够转一圈。
- 为推杆添加线性马达,方向向上,注意这里运动中的参数设置,我们采用震荡模式,将频率设置为0.2Hz,在位移和时间曲线表中,推杆的位移从0秒开始一直到5秒结束,在结束时推杆回到原位。这里5秒的运动时间是根据0.2Hz算出来的。这样推杆运动一个周期的时间和凸轮运动一个周期的时间刚好匹配,只有这样,我们才能够得到精准的曲线。
- 注:这里推杆的运动方式可以根据需要通过数据点的方式来建立,这里使用震荡模式的运动只是为了简便的演示推杆运动模式的添加过程。

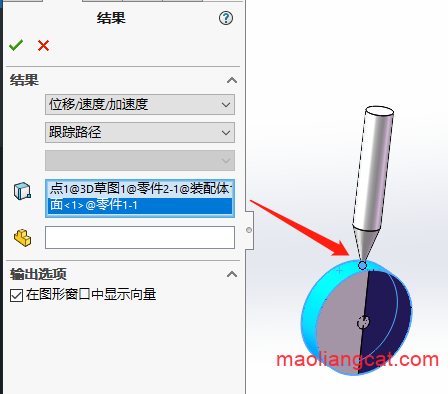
- 添加一个结果和图解,选择位移/速度/加速度→跟踪路径,在下面的选择框中选择推杆底部的点(这个点在零件建模的时候需要用草图提前绘制好)和凸轮基圆的圆周面。
- 最后,点击运算,solidworks motion就会根据计算画出推杆上的点相对于凸轮基圆的运动轨迹了。

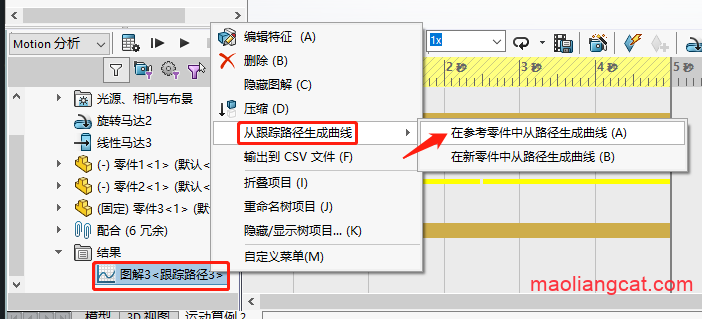
- 在结果图解中,按照下图的位置,找到在参考零件中从路径生成曲线。
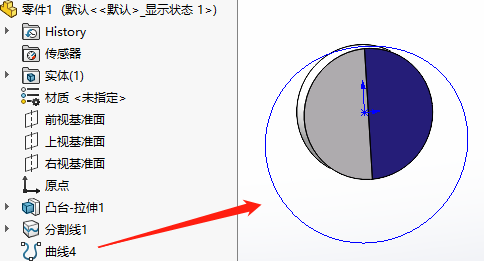
- 打开凸轮基圆零件,在这个零件的设计树中会出现一个曲线,这个曲线就是前面solidworks motion中的轨迹线了。为了得到这个凸轮,我们剩下的工作就是将这个曲线转换为实体引用,并通过凸台拉伸和凸轮基圆合并后得到我们需要设计的凸轮。
到这里solidworks凸轮运动仿真的反向设计方法就介绍完了,通过这个方法我们可以反向设计类似滚子推杆凸轮机构的凸轮型线。由于目前solidworks版本在solidworks motion中仅支持单点的路径跟踪,因此,这种设计方式并不适用于盘面推杆的设计,在这一点上还是有一定的局限性。
声明:猫亮设计所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。